3.2 Formas geométricas tridimensionales (Superficies planas y curvas).
MÉTODO DE
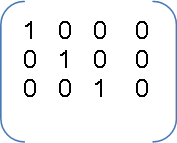
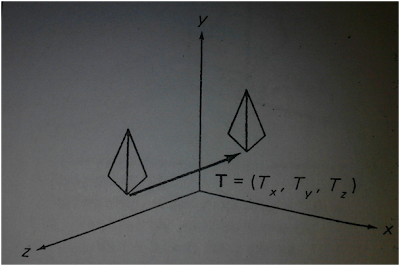
TRASLACIÓN
En una
representación coordenada homogénea tridimensional, un punto es trasladado
(fig.11.1) de la posición (x,y,z) a la posición (x’,y’,z’)
con la Operación matricial.
[x´,y´,z´,1]=[x, y, z, 1]
Los
parámetros Tx, Ty, Tz, que especifican distancias de
traslación para las coordenadas, reciben la asignación de cualquier valor
real. La representación matricial de la ecuación 11.1 es equivalente a las tres
ecuaciones
x’ =x + Tx, y’ = y + Ty, z’ =z + Tz
Un objetivo se
traslada en tres dimensiones transformando cada punto definidor del objeto. La
traslación de un objeto representada como un conjunto de superficies
poligonales se efectúa trasladando los valores coordenados para cada vértice de
cada superficie. El conjunto de posiciones coordenadas trasladadas de los
vértices define entonces la nueva posición del objeto.
MÉTODO DE
ESCALACIÓN
Operación
matricial.
[x´,y´,z´,1]=[x,
y, z, 1]
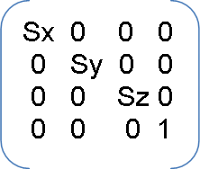
Los parámetros de
escalación Sx, Sy, Sz, se les asigna asignación cualquier valor
positivo.
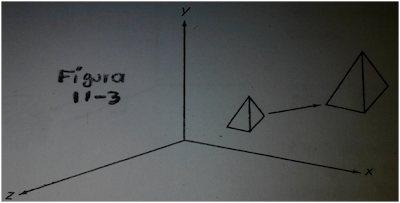
Cuando la
transformación 11-3 se aplica para definir puntos en un objeto, el objeto se
escala y se desplaza en relación con el origen coordenado.
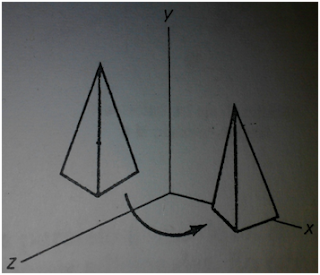
MÉTODO DE ROTACIÓN
Para especificar
una transformación de rotación de un objeto, se debe designar un eje de
rotación (en torno al cual se hará girar el objeto) y la cantidad de rotación
angular. En aplicaciones bidimensionales, el eje de rotación siempre es
perpendicular al plano xy. En tres dimensiones, un eje de rotación puede tener
cualquier orientación espacial.los ejes de rotación más fáciles de manejar son
aquellos que son paralelos a los ejes coordenados. Asimismo, podemos valernos
de las rotaciones en torno a los tres ejes coordenados con el fin de producir
una rotación en torno a cualquier eje de rotación especificado en forma
arbitraria.
Las direcciones de
rotación positivas en torno a los ejes coordenados son en sentido contrario al
del reloj, como se observa a lo largo de la posición positiva de cada eje en
dirección del origen.
Operación
matricial de rotación en el eje Z
El parámetro Ѳ especifica el ángulo de rotación.
[x´,y´,z´,1]=[x,
y, z, 1]
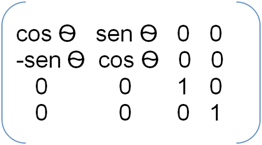
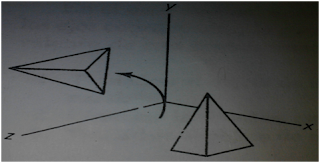
Imagen que muestra
la rotación de un objeto en torno al eje Z.
Operación
matricial de rotación en el eje X
[x´,y´,z´,1]=[x,
y, z, 1]
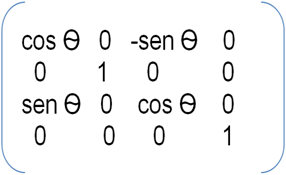
Operación
matricial de rotación en el eje y
[x´,y´,z´,1]=[x,
y, z, 1]
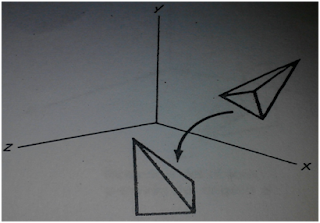
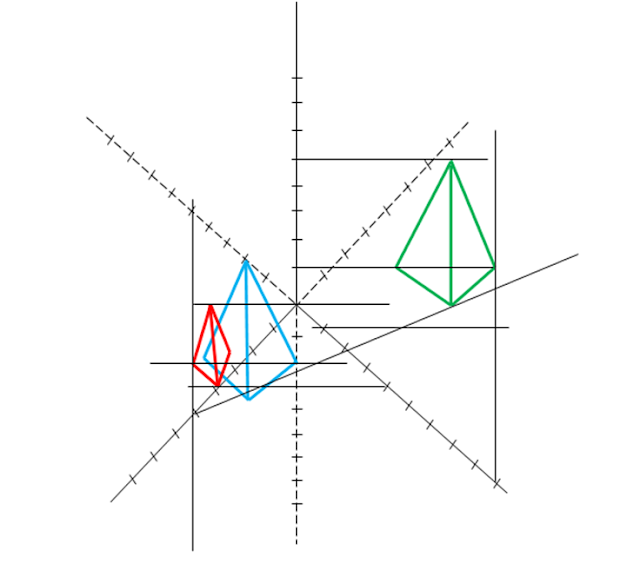
REPRESENTACIÓN EN
UN GRÁFICA 3D DE LOS TRES MÉTODOS ANTERIORES:
3.4
Lineas y superficies curvas
Las
representaciones de líneas y superficies son de aplicación a los procesos de
diseño de formas y de desarrollo de planos constructivos. A los tradicionales
puntos de vista de si debe determinarse la enseñanza para todas las
aplicaciones o por el contrario si debe consistir en una formación de gran
contenido geométrico-proyectivo se une la utilización de ordenadores. Para
conjugar estas tendencias el autor expone la representación de curvas y
superficies de aplicación técnica: Punto, recta, plano, circunferencia, otras
curvas planas, hélice cilíndrica, poliedros regulares, superficies radiadas,
esfera, etc. El estudio de algunas superficies como las desarrollables, muy
importantes en los trazados de construcción naval. Finalmente analiza las
ecuaciones analíticas, absolutamente imprescindibles para su representación por
ordenador.
Los
métodos más eficientes para determinar la visibilidad de objetos con
superficies curvas son la proyección de rayos y los métodos basados en árbol
octal. Con la proyección de rayos, calculamos las intersecciones entre los
rayos y las superficies y localizamos la distancia de intersección más pequeña
a lo largo del trayecto del rayo. Con los arboles octales, simplemente
exploramos los nodos de adelante hacia atrás para localizar los valores de
color de superficie. Una vez definida una representación en árbol octal a
partir de las definiciones de entrada de los objetos, todas las superficies
visibles se identifican con el mismo tipo de procesamiento.
No
es necesario realizar ningún tipo especial de consideración para diferentes
tipos de superficies, ya sean curvas o de cualquier otra clase. Una superficie
curva también puede aproximarse mediante una malla poligonal, y entonces
podemos utilizar algunos de los métodos de identificación de superficies
visibles previamente expuestos. Pero para algunos objetos, como las esferas,
puede que sea más eficiente, además de mas preciso utilizar el método de
proyección de rayos y las ecuaciones que describen la superficie curva.
Representación
de superficies curvas Podemos representar una superficie como una ecuación
implícita de la forma
f(x,y,z)=0
o
con una representación perimétrica. Las superficies de tipo spline, por
ejemplo, se suelen describir mediantemente ecuaciones para métricas.
En
algunos casos, resulta útil obtener una ecuación explicita de la superficie,
como por ejemplo una ecuación que nos de la altura con respecto a un plano de
tierra xy: Z=f(x,y) Muchos objetos de interés, como las esferas, elipsoides,
cilindros y conos tienen representación mediante ecuaciones cuadráticas.
Estas
superficies se suelen utilizar comúnmente para modelar estructuras moleculares,
cojinetes, anillos y ejes. Los algoritmos de líneas de barrido y de proyección
de rayos requieren a menudo técnicas de aproximación numérica para resolver la
ecuación de la superficie en el punto de intersección con una línea de barrido
o con un rayo de un pixel. Se han desarrollado diversas técnicas, incluyendo
cálculos en paralelo e implementaciones hardware de gran velocidad, para
resolver las ecuaciones de intersección con superficies curvas para los objetos
más comúnmente utilizados.


Comentarios
Publicar un comentario